曲率半径 (curvature and radius of curvature)
曲率 (curvature) は,曲線上のある点におけるその曲線の曲がり具合を示す指標であり,その曲率の逆数が 曲率半径 (radius of curvature) を表す.曲線上の任意の点付近の曲線の微小部分は,その点での曲率半径を半径とする円(曲率円(curvature circle)という)で近似できる.曲率半径が大きいと曲がり具合が緩く,曲率半径が小さいと曲がり具合がきつくなる.したがって,曲がり具合がきついほど曲率は大きくなる.
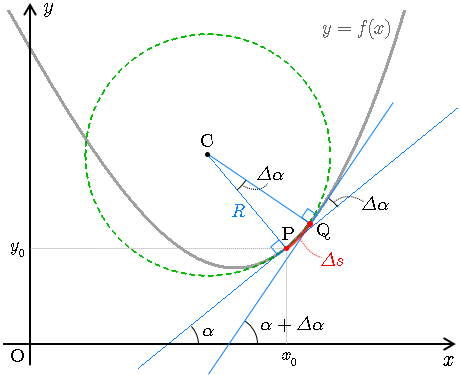
■ 曲率半径の定義
xy
平面で定義された曲線
y=f(x)
上の点 P
(
x0
,
y0
)
から曲線に沿って
Δs
だけ変位した点を Q とする.この
Δs
部分を円弧とみなし,その円の中心を点 C ,角PCQを
Δα
とすると,この円の半径は
R=
|
Δs
Δα
|
である(絶対値をとっているのは角
Δα
が時計回りの場合,負の値となるからである).ここで,極限
Δs→0
をとると,点 P における曲率半径
R=
lim
Δs→0
|
Δs
Δα
|
=
|
ds
dα
|
が求まる.点 P における曲率
κ
は曲率半径
R
の逆数なので次式となる.
κ=
1R
=
|
dα
ds
|
ただし,絶対値をとらずに曲率を定義する場合もあり(符号付き曲率 (signed curvature) ),曲率の値は正にも負にもなる.この場合,その符号は微小角度
dα
の向きを表し,正のとき反時計回りの向き,負のとき時計回りの向きを示す.
■ 曲線
y=f(x)
の曲率半径
図に示すように,点 P での接線と
x
軸とのなす角を
α
とすると,点 Q での接線と
x
軸とのなす角は
α+Δα
となるので,角PCQは点 P から点 Q の接線の角度の増分に対応する.点 P での接線の傾きは
tanα=
dy
dx
なので,
(tanα
)′
dα=
(
dy
dx
)
′
dx
⇒
dα
cos2
α
=
d2y
dx2
dx
⇒
dα=
cos2α
d2y
dx2
dx
=
1
1+tan2α
d2y
dx2
dx
となり,最終的に
dα=
d2y
dx2
1+
(
dydx
)
2
dx
を得る.また,
ds=
(dx)2
+
(dy)2
=
1+
(
dydx
)
2
dx
であるので,曲率半径
R
は
x
の関数として
R(x)=
|
ds
dα
|
=
|
1+
(
dy
dx
)
2
⋅
1+
(
dy
dx
)
2
d2y
dx2
|
=
{
1+
(
dydx
)
2
}
32
|
d2y
dx2
|
と求まる.点 P では
x=
x0
なので,点 P における曲率半径は
R(x0)
である.
また,曲率中心 (center of curvature)(点 P 付近の曲線を近似する円の中心)C の座標
(
cx
,
cy
)
は次式で求まる.
(
cx
,
cy
)
=
(
x0
,
y0
)
+
ds
dα
(
−
dy
ds
,
dx
ds
)
=(
x0
,
y0
)
+
(
−
dy
dα
,
dx
dα
)
=(
x0
,
y0
)
+
1+
(
dydx
)
2
d2y
dx2
(
−
dydx
,
1
)
■ パラメータ表示された曲線
x=x(t)
,
y=y(t)
の曲率半径(導出)
曲率半径
R(t)=
{
(
dxdt
)
2
+
(
dydt
)
2
}
32
|
dxdt
d2y
dt2
−
dydt
d2x
dt2
|
曲率中心
(
cx
,
cy
)
=
(
x(t)
,
y(t)
)
+
(
dxdt
)
2
+
(
dydt
)
2
dxdt
d2y
dt2
−
dydt
d2x
dt2
(
−
dydt
,
dxdt
)
■ 陰関数表示された曲線
F(x,y)
=0
の曲率半径(導出)
曲率半径
R(x,y)
=
(
Fx2
+
Fy2
)
32
|
detM
|
曲率中心
(
cx
,
cy
)
=
(
x , y
)
+
Fx2
+
Fy2
detM
(
Fx
,
Fy
)
ここで,行列
M
は 3×3の正方行列
M
=
(
0
Fx
Fy
Fx
Fxx
Fxy
Fy
Fyx
Fyy
)
であり,
Fx
=
∂F
∂x
,
Fy
=
∂F
∂y
,
Fxx
=
∂2F
∂x2
,
Fxy
=
∂2F
∂y∂x
,
Fyx
=
∂2F
∂x∂y
,
Fyy
=
∂2F
∂y2
である.
ホーム>>カテゴリー分類>>幾何>>曲率半径