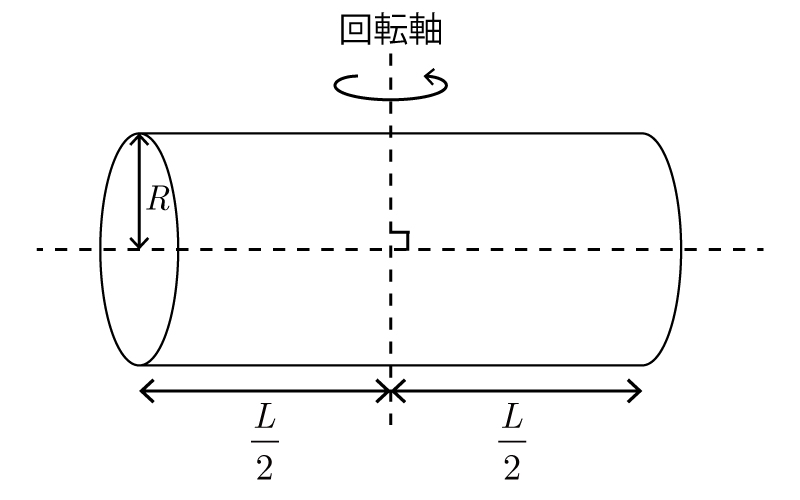
図のように回転軸を
y
軸にとり,
y
軸と直交する
zx
平面をとる.円柱の密度を
ρ
とすると
ρ=
MπR2L
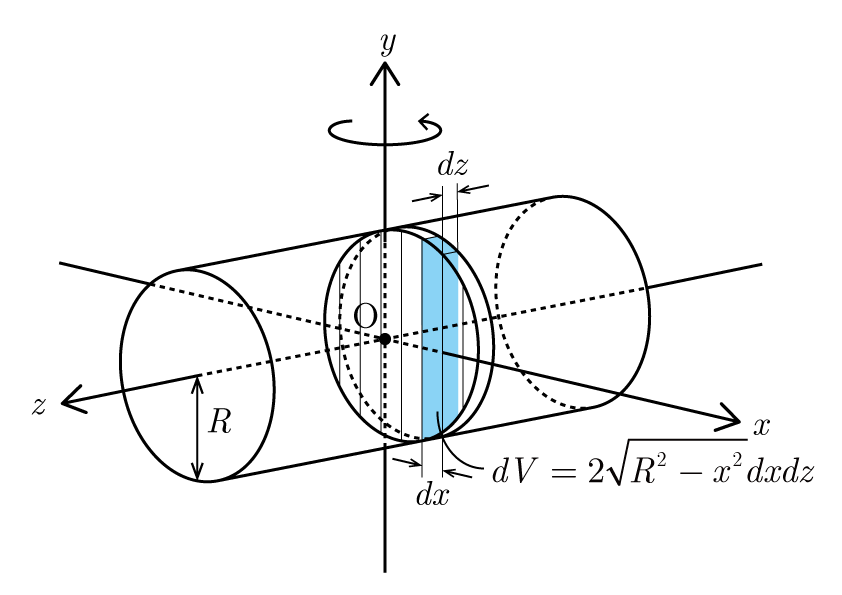
である.この円柱を
z
軸方向に微小厚み
dz
でスライスし,この厚み
dz
の円板部分をさらに
x
軸方向に幅
dx
で分割する.断面積
dxdz
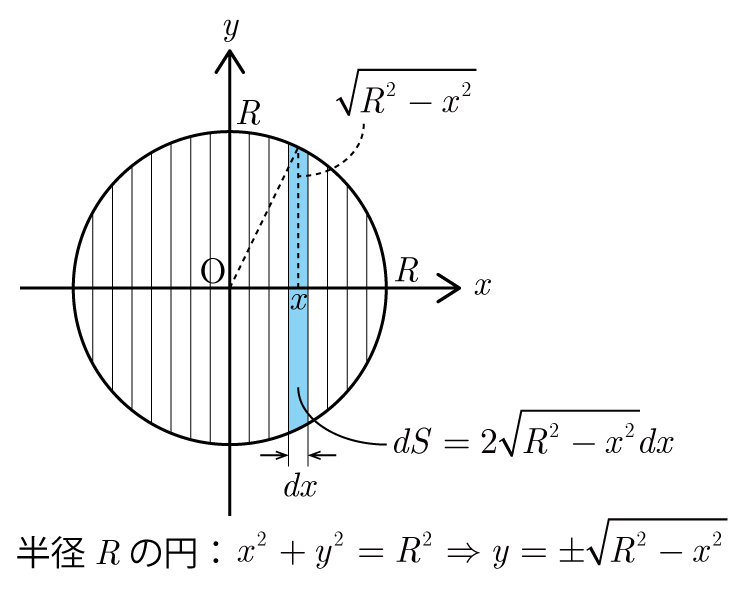
の微小角柱の長さは
2
R2
−x2
であるので,この部分の質量を
dm
とおくと,
dm=ρ⋅2
R2
−x2
⋅dxdz
=
M
πR2L
⋅2
R2
−x2
dxdz
=
2M
πR2L
R2
−x2
dxdz
となる.
 y
y
軸の先から円柱を見た図
y
軸の先から円柱を見た図から分かるように,この微小角柱の回転軸までの距離(回転半径)は
r=
x2+z2
であるので,微小角柱の回転軸周りの慣性モーメント
dI
は,
dI=
r2dm
=
(
x2
+z2
)
⋅
2M
πR2L
R2
−x2
dxdz
と表せる.したがって,求める慣性モーメント
I
は,
I=
∫D
dI
=
∫D
r2dm
=
∫
−L2
L2
∫−RR
(
x2
+z2
)⋅
M
πR2L
⋅2
R2
−x2
dx
dz
=
2M
πR2L
∫−RR
R2
−x2
{
∫
−L2
L2
(
x2
+z2
)
dz
}
dx
となる.ここで,
∫
−L2
L2
(
x2
+z2
)dz
=2
∫0
L2
(
x2
+z2
)
dz
=2
[
x2z
+13
z3
]
0
L2
=2
{
x2
⋅L2
+13
(
L2
)
3
}
=Lx2
+
L3
12
より,次式を得る.
I=
2M
πR2L
∫−RR
R2
−x2
(
Lx2
+
L3
12
)
dx
=
2M
πR2
∫−RR
R2
−x2
(
x2
+
L2
12
)dx
次に,
x=Rsinθ
とおくような置換積分を考えると,
θ
についての積分範囲は
となり,形式的に
dx
dθ
=
d
dθ
Rsinθ=Rcosθ⇒dx=Rcosθdθ
と書けるので
∫
−R
R
R2
−x2
(
x2
+
L2
12
)dx
=
∫
−π2
π2
R2
−R2
sin2
θ
⋅
(
R2
sin2
θ+
L2
12
)
Rcosθdθ
=R4
∫
−π2
π2
cos2
θ
(
1−
cos
2
θ
)dθ
+
R2L2
12
∫
−
π2
π2
cos2
θdθ
=R4
⋅2
∫
0
π2
(
cos2
θ−
cos4
θ
)dθ
+
R2
L2
12
⋅2
∫0
π2
cos2
θdθ
↓ ここで,ウォリスの公式を利用
=2R4
(
12
⋅π2
−34
⋅12
⋅π2
)
+
R2
L2
6
⋅12
⋅π2
=
πR4
8
+
πR2
L2
24
を得る.したがって,
I=
2M
πR2
(
πR2
8
+
πR2
L2
24
)
=
MR2
4
+
ML2
12
が求まる.
★ 極座標を用いて計算
円柱を
z
軸方向に微小厚み
dz
でスライスしたときの円板について,極座標を用いて,微小部分に分割すると,その微小体積は
dV=dSdz
=
rdrdθdz
となるので,この部分の微小質量は
dm=
ρ⋅
rdrdθdz
=
M
πR2L
⋅
rdrdθdz
である.この微小部分の回転軸までの距離(回転半径)は
u=
x2
+z2
=
(
rcosθ
)
2
+
z2
となるので,微小部分の,回転軸周りの慣性モーメント
dI
は
dI
=u2
dm
=
(
r2
cos2
θ+
z2
)
⋅
M
πR2L
⋅rdrdθ
dz
と表せる.したがって,求める慣性モーメント
I
は,
I=
∫
V
dI
=
∫
V
u
2
dm
=
∫
−
L
2
L
2
∫
0
2π
∫
0
R
(
r
2
cos
2
θ+
z
2
)
M
π
R
2
L
rdr
dθ
dz
=
M
π
R
2
L
∫
−
L
2
L
2
{
∫
0
2π
(
∫
0
R
(
r
3
cos
2
θ+r
z
2
)dr
)dθ
}dz
=
M
π
R
2
L
∫
−
L
2
L
2
{
∫
0
2π
[
1
4
r
4
cos
2
θ+
1
2
r
2
z
2
]
0
R
dθ
}dz
=
M
π
R
2
L
∫
−
L
2
L
2
{
∫
0
2π
(
1
4
R
4
cos
2
θ+
1
2
R
2
z
2
)
dθ }dz
=
M
2πL
∫
−
L
2
L
2
{
∫
0
2π
[
1
4
R
2
(
1+cos2θ
)+
z
2
]
dθ }dz
=
M
2πL
∫
−
L
2
L
2
[
1
4
R
2
(
θ+
sin2θ
2
)+θ
z
2
]
0
2π
dz
=
M
2πL
∫
−
L
2
L
2
(
π
2
R
2
+2π
z
2
)dz
=
M
L
∫
−
L
2
L
2
(
1
4
R
2
+
z
2
)dz
=
M
L
[
1
4
R
2
z+
1
3
z
3
]
−
L
2
L
2
=
M
L
(
1
4
R
2
L+
1
12
L
3
)
=
M
R
2
4
+
M
L
2
12
となる.
★ 平行軸の定理を用いて計算
図に示すように,中心が原点となるように
xy
平面に置かれた厚さ
dz
の一様な円板の,
y
軸のまわりの慣性モーメント
d
I
G
は,
dIG
=
∫
S
(
rcosθ
)
2
ρdV
=
∫
0
2π
∫0R
r2
cos2
θ
M
πR2
L
rdrdθ
dz
=
M
πR2L
∫
0
2π
{
∫0R
r3
dr
}
cos2
θdθ
dz
=
M
πR2L
∫02π
(
14
R4
)
cos2
θdθ
dz
=
MR2
4πL
∫
0
2π
cos2
θdθ
dz
=
MR2
4πL
∫
0
2π
(
1+cos2θ
2
)dθ
dz
=
M
R
2
4πL
[
θ2
+
sin2θ
4
]
0
2π
dz
=
MR2
4L
dz
である.原点
O
から
z
軸方向に
z
だけ移動した厚さ
dz
の円板の慣性モーメント
dIz
は,平行軸の定理により,
dIz
=dIG
+
M
πR2L
⋅πR2
dz⋅
|z|
2
=
MR2
4L
dz+
ML
z2
dz
であるので,求める慣性モーメント
I
は,
I=
∫z
dIz
=
∫
−
L2
L2
(
MR2
4L
+ML
z2
)dz
=
[
MR2
4L
z+
M3L
z3
]
−L2
L2
=
MR2
4
+
ML2
12
となる.