|
関連するページを見るにはこのグラフ図を利用してください.
減衰振動 : ばね‐質量‐ダンパー系 (spring - mass - damper system)
ばねの先端に取り付けられたおもりにダンパー(制動器)を取り付けた系(ばね‐質量系にダンパーを加えた系:ばね‐質量‐ダンパー系)の運動を考える.ダンパーはおもりの運動を抑制する抵抗力をおもりに加える役割を果たす.
このばね‐質量‐ダンパー系の数学モデルを得るために以下を仮定する:
- 重力加速度の大きさ は一定である.
- おもりは質量 の質点である.
- ばねの質量およびダンパーの可動部の質量はゼロである(おもりと可動部の質量を合わせて としてもよい).
- ばねは常にフックの法則に従い,その弾性定数(ばね定数)を とする.
- ダンパーはおもりの速度に比例した抵抗力をおもりに作用させ,その比例定数を とする.
- 空気の影響は無い(おもりの速度に比例する空気抵抗(流体の抵抗)を考えて,空気(流体)がダンパーの役割を果たすとしてもよいが,ここでは制動器のみの抵抗を考える).
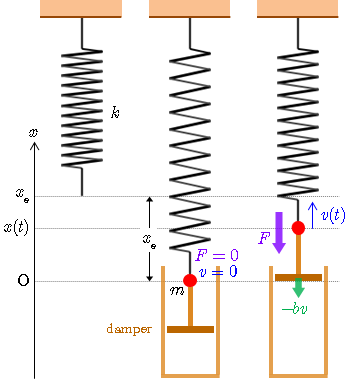
図のように,質量 の質点(赤丸)を先端に付けたばねを鉛直に吊るし,質点にはダンパーを取り付ける.質点を静止させたとき,ばねは自然長から だけ伸びたとすると,質点に抵抗力は作用せず,鉛直上向きの弾性力 と下向きの重力 が釣り合い, が成り立つ.この釣り合いの位置を原点 O として鉛直上向きに 軸をとる.
質点を振動させたときに質点に作用する力は,質点の位置 と速度 を用いて,
ばねの弾性力 :
ダンパーによる抵抗力 :
(
:正の比例定数)
重力 :
と表されるので,それらの合力 は
- - - (1)
である(釣り合いの位置を原点 O にとると,重力の影響は考慮しなくてよい).したがって,質点の運動方程式は
- - - (2)
となる.上式の両辺を で割り,減衰率 ,単振動の角振動数 を導入して整理すると,式(2)は
- - - (3)
と表され,減衰振動の従う微分方程式が得られる.この微分方程式を解くと, と の関係に応じて,不足減衰( ),臨界減衰( ),過減衰( )の解が求まる.
ばね‐質量‐ダンパー系のシミュレーションにより,これらの解が確認できる.