|
|||||||||||||
|
|||||||||||||
|
応用分野:
直交変換
, 運動軌道における曲率半径
問題リスト←このページに関連している問題です
回転行列 (rotation matrix)
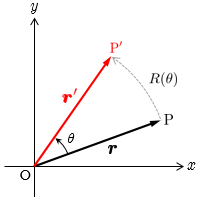
原点を通る軸の周りの回転操作による座標変換は1次変換であり,その回転変換の表現行列を回転行列 (rotation matrix)という.ある軸 の周りに だけ回転(反時計回りを正とする)するときの回転行列 は,
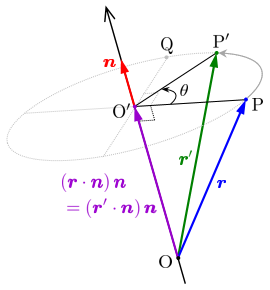
という性質をもつ.性質 1, 2 より,回転行列は行列式が1の直交行列であるため,回転変換は直交変換の一つである.性質 3 は,軸 の周りに だけ回転してから軸 の周りに だけ回転する操作は,ある軸 の周りに,ある角度 だけ回転することに等しい,ということを意味する(回転行列の積は回転行列).
◆ 2次元の回転行列
⇒ 導出
平面座標の回転軸は 面に垂直な軸のみなので, の添え字を省略する.回転軸が決まっているので平面座標の回転行列の積は次式を満たす.
◆ 3次元の回転行列
■ 軸周り: ⇒ 導出
■ 軸周り: ⇒ 導出
■ 軸周り: ⇒ 導出
■ 任意の軸周り(軸方向の単位ベクトルを とする):
最終更新日:2023年1月14日